Precise control in modern robotic applications is always an open issue due to unknown time-varying
disturbances.
Existing meta-learning-based approaches require a shared representation of environmental structures,
which lack flexibility for realistic non-structural disturbances.
Besides, representation error and the loss of model generalizability can lead to heavy prediction accuracy
degradation.
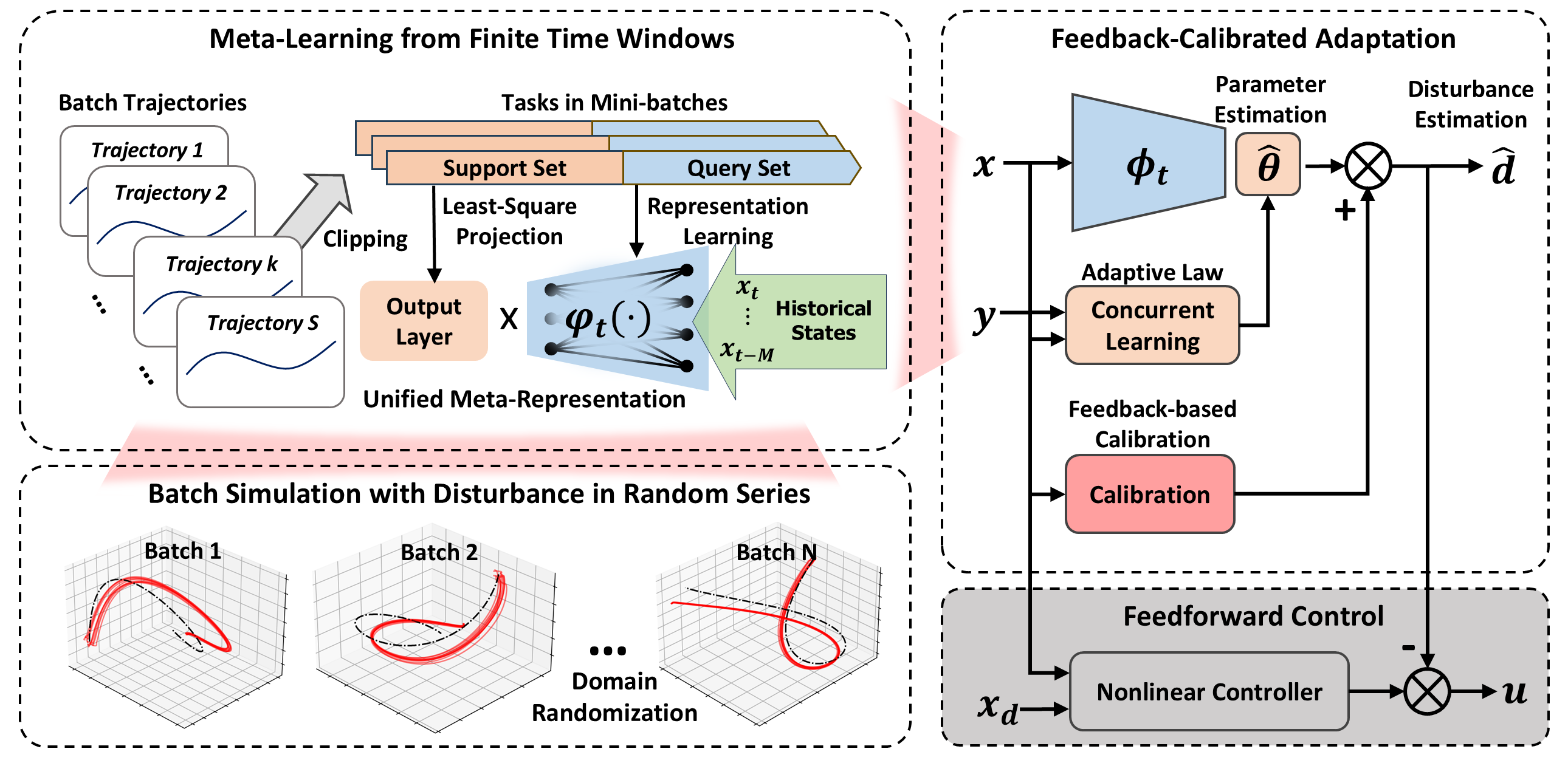
This work introduces a meta-learning-based disturbance estimation framework with feedback-calibrated
online adaptation.
With a generalizable spatial-temporal representation embedded with historical state information,
non-structural disturbances can be fully reflected by meta-learning.
The online adaptation process is then calibrated by a state-feedback mechanism to attenuate the learning
residual.
Theoretical analysis shows that simultaneous convergence of both the online learning error
and the disturbance estimation error can be achieved. By incorporating the meta-learned model with a
baseline controller,
it significantly outperforms the state-of-the-art methods in the quadrotor flight control under multiple
disturbances.